This week I gave a talk for our “AMR Streaming” paper [1], with Ingo Wald, Alper Sahistan, Matthias Hellmann, and Will Usher. The paper is a follow-up to our original paper [2] at VIS in 2020 and “simply” adds support for time-varying data with SSD to GPU streaming updates to our ExaBricks software.
The central figure of this paper at first sight looks innocent enough, but when taking a closer look contains so much detail, trial and error, completely back to the drawing board phases that a simple paper and talk at a symposium just don’t do it justice.
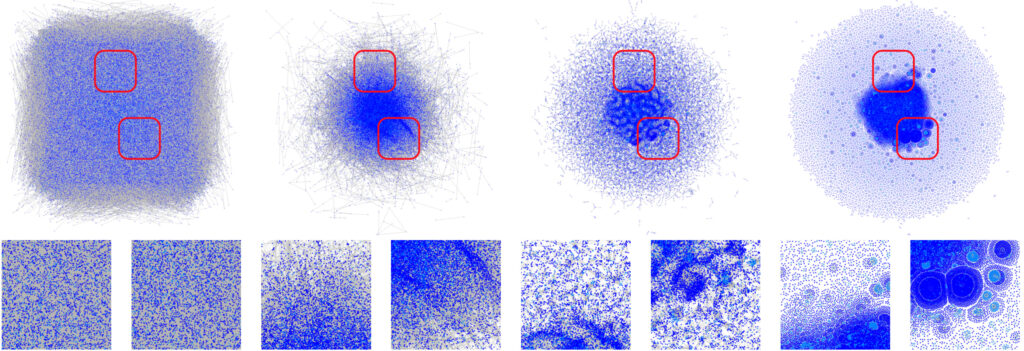
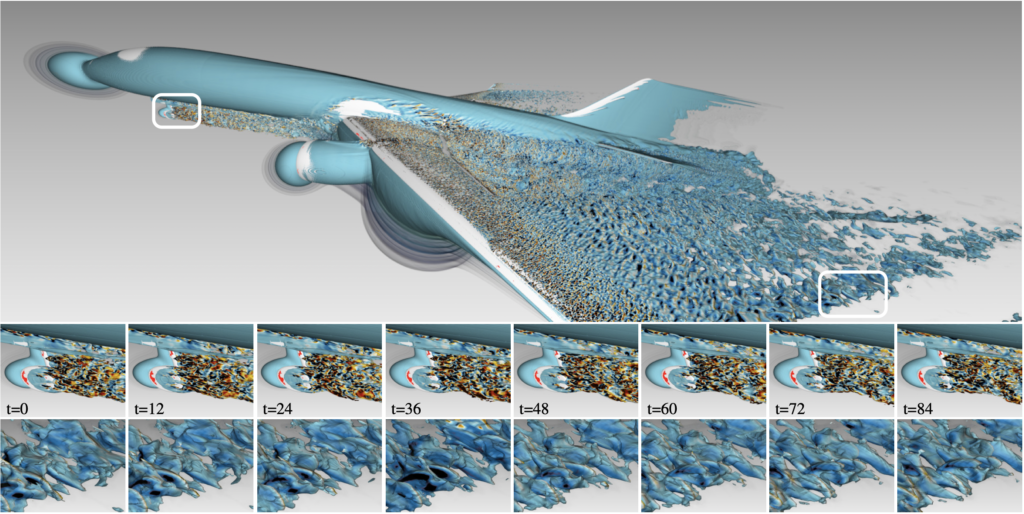
Here’s that central figure:
What the paper does is take our original ExaBricks software, pick a couple of representative snapshots of NASAs exajet, and extend the software to support fast streaming updates, as the data set as a whole is huge: 400 time steps at roughly 10 GB (4 fields with 2.5 GB each).
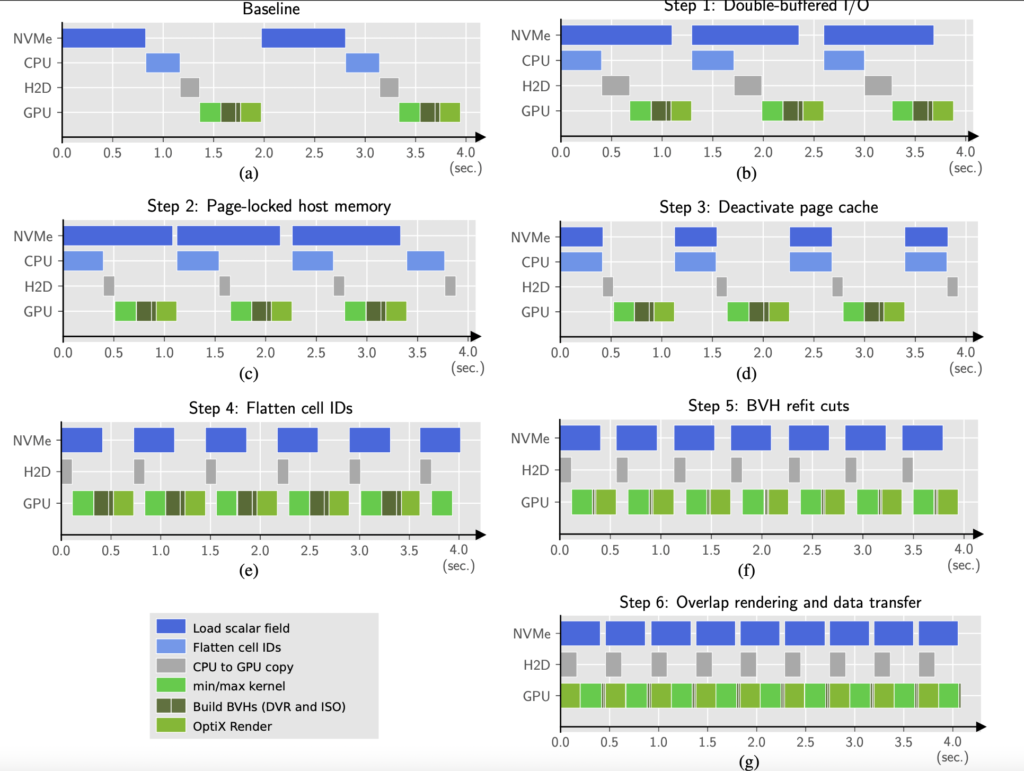
Now Fig. 3 from the paper presents a couple fairly straightforward optimizations; adding double buffering to overlap file I/O with compute. Using pinned memory to achieve faster copy performance from host to device; unrolling cell ID indices that map 1:1 into scalar fields; deactivating the OS page cache to reach maximum SSD/NVMe read bandwidth, etc etc. The list is long and the measures we have taken compound, yet from a scientific perspective, they’re admittedly simple if not trivial: one might even argue they’re “obvious”. There’s a small number of algorithmic improvements we propose, but still.
But recalling how that paper and software actually came to be, reminds me that the process was anything but simple or trivial, let alone obvious. If you take a look at Fig. 3 above, you can see how the first illustration shows what happens if you simply take ExaBricks and exajet, and just run the software on each individual time step. The result is a two seconds round trip per frame rendered, including the file I/O, GPU copies, and general data wrangling that are necessary to render these frames. The transformations we applied to this naïve baseline gradually squeeze the individual processes, shave off a couple milliseconds here and there, make some improvements to build BVHs more efficiently, to finally arrive at a design that is more or less general and streamlined for high-quality rendering of very large, time-varying AMR data.
Now here’s what the figure does not show: the original design we came up with (and actually fully implemented…) was totally different; see how the final design in Fig. 3 is static: we use double-buffering, could potentially also squeeze things more and eventually move to a design that does triple buffering; but the original design we had was a dynamic LRU cache implemented with a host-side queue that could accommodate N (on the order of 30 or 50) time steps, and was filled in a background thread, and another, much smaller queue for host-to-device transfers. That system was functional (and there was actually quite a bit of engineering effort and technical debt that went in there), but eventually proved to be ineffective. The LRU cache was generally hard to maintain as a piece of software; but most problematic was unpredictable performance behavior when a time step was dynamically loaded and we were at the same time copying data to the GPU.
We struggled a while with this design, but eventually gave up on it, although in our mind it was the “obvious” thing to do (that’s actually reflected in the literature, and there was even another AMR streaming paper [3] at EGPGV that focuses on CPU rendering and that does use this type of design); but with the two devices connected over PCIe 4.0 (SSD and GPU) just would not scale (for us; in practice..). So, back to the drawing board, throwing all the stuff we had so far over board and redesigning the system from scratch.
File I/O… you might think, that when using a fast NVMe SSD, you’d just use the usual fopen/fread machinery (and avoid C++ streams), and then the copies be as fast as it gets. Turns out that.. no, as the operating system’s page cache is getting in your way; performing a literature study on low-latency file I/O, you’ll find there’s a whole research area looking into and optimizing what’s basically nothing else but fast reads from SSDs (what we finally ended up doing was deactivating the page cache altogether using system calls, this also turned out to give more consistent results, and we were already planning to do this anyway to give more consistent benchmark results as well).
Question from the audience: “did you guys consider using managed instead of host-pinned memory?!”… well, sure. We did. Turned out to be 1.5 to 2x slower; so, here goes another round of experiments.
And there’s a whole list, these are just the tip of the iceberg. With the exception of our takes on page caches and read operations, non of this actually made it into the final paper; that just contains that innocent looking list with simple (if not trivial) optimizations that eventually gave us a speedup of 4x over the baseline.
Then, there’s a limitation, in that AMR hierarchies often change with time, but ours aren’t allowed to (exajet does not); so obviously, we were called out by the reviewers for not mentioning this prominently enough, and sparked a bit of discussion (also thanks to Pat Moran who published the exajet data set for providing some valuable insights there) as of how realistic that property of the data actually is. In aeronautics, it’s actually not uncommon that engineers/scientists know in advance what good seed regions are, and then place their seeds there and fix the hierarchy over time, because the macro structure is just known a priori (and safes them both simulation time and memory).
From our side, for now only supporting this kind of data is of course a limitation (and points to some obvious… yet not trivial future work). But with a different group of reviewers, could definitely have ended differently, if not with the paper bouncing.
In summary, it’s just fascinating how much work can go into a single paper, and how compressed the final information becomes on these 8-9 pages, given all the hoops you have to jump through to finally arrive at the results that make it into the paper. That said, we hope that the lessons we learned from the process also help others with their decisions and they’ll apply them to their own large data and GPU related problems. And if you haven’t done so, go ahead and read the paper; an authors’ copy can be found here.
[1] S. Zellmann, I. Wald, A. Sahistan, M. Hellmann, W. Usher (2022): Design and Evaluation of a GPU Streaming Framework for Visualizing Time-Varying AMR Data. EGPGV 2022.
[2] I. Wald, S. Zellmann, W. Usher, N. Morrical, U. Lang, V. Pascucci (2020): Ray Tracing Structured AMR Data Using ExaBricks. IEEE VIS 2020.
[3] Q. Wu, M. Doyle, K.-L. Ma (2022): A Flexible Data Streaming Design for Interactive Visualization of Large-Scale Volume Data. EGPGV 2022.